
odehybrid
Hybrid continuous and discrete propagation.
This function propagates an ordinary differential equation along with a
discrete update equation in a manner similar to MATLAB's ode45 function
(which only propagates an ordinary differential equation). This is useful
for implementing discrete-time controllers or simulating processes that
are updated at discrete intervals.
Interfaces
[t, yc, td, yd] = odehybrid(solver, ode, ...
de, dt, ...
ts, ...
yc0, yd0);
[t, yc1..m, td, yd1..n] = odehybrid(solver, ode, ...
de, dt, ...
ts, ...
{yc1, yc2..m}, {yd1, yd2..n});
[t, ..., td, ..., te, yc1..m, yd1..n, ie] = odehybrid(solver, ode, ...
de, dt, ...
ts, ...
yc0, yd0);
[...] = odehybrid(solver, ode, ...
{de1, de2, ...}, [dt1, dt2, ...], ...
ts, ...
yc0, yd0);
[...] = odehybrid(..., [options], [log]);
sol = odehybrid(...);
Inputs
| solver | Continuous-time propagator to use, e.g. @ode45 |
|---|---|
| ode | Ordinary differential equation to use with solver. The interface should be
where |
| de | Discrete update equation(s) (either a function handle or cell array of function handles) with the same inputs as ode but outputing the updated continuous and discrete states (n+m outputs). |
| dt | Time step(s) of discrete update equation(s). If de is a cell array of multiple functions, this should be an array of the same size. |
| ts | Time span, [t_start, t_end] |
| yc0 | Cell array of initial continuous states |
| yd0 | Cell array of initial discrete states |
| options | (Optional) options structure from odeset |
| log | (Optional) TimeSeriesLogger for logging in the ode and de. If a log is passed in, both ode and de must be able to accomodate having a log input or not as the final argument. E.g., ode will be called as:
and
|
Outputs
| t | Times corresponding to continuous states (nc-by-1) |
|---|---|
| yc1, yc2, ... ycm | Continuous state outputs (m outputs, each nc-by-1) |
| td | Times corresponding to discrete state updates (nd-by-1) |
| yd1, yd2, ... ydn | Discrete state outputs (n outputs, each nd-by-1) |
| te | Times corresponding to events (ne-by-1) |
| yce1..m | Continuous states at events (m outputs, each ne-by-1) |
| yde1..n | Discrete states at events (n outputs, each ne-by-1) |
| ie | Index of triggering event. See documentation in odeset for more on events. |
| sol | If a single output is requested, it will be a structure with
fields for each of the individual outputs. The various
continuous states will be grouped in yc, the discrete into
yd, the continuous states at events into yce, and the
discrete states at events into yde.
|
Example
This is a quick example of simulating an unstable continuous system with a stabilizing discrete-time controller.
ode = @(t, x, u) [0 1; 2 0] * x + [0; 1] * u; % Differential equation
de = @(t, x, u) deal(x, -[8 4] * x); % Discrete update equation
dt = 0.1; % Discrete eq. time step
ts = [0 5]; % From 0 to 5s
x0 = [1; 0]; % Initial continuous state
u0 = 0; % Initial discrete state
[t, x, tu, u] = odehybrid(@rkadapt, ode, de, dt, ts, x0, u0); % Simulate!
plot(t, x, tu, u, '.'); xlabel('Time'); % Plot 'em.
legend('x_1', 'x_2', 'u'); % Label 'em.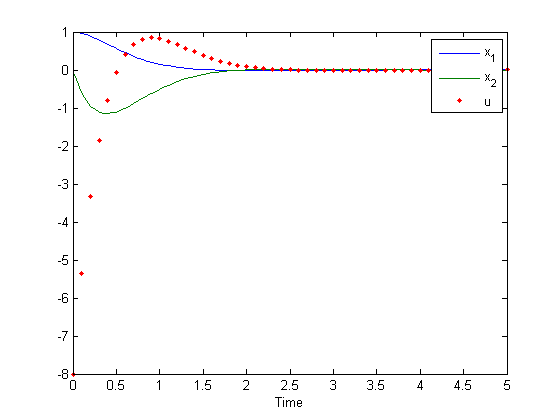
See Also
Examples, Solvers,rkadapt, rkfixed, ode45 (MATLAB), odeset (MATLAB)February 4th, 2023
©2023 An Uncommon Lab