
rkfixed
Explicit Runge-Kutta fixed-step integration using the specified weights, nodes, and Runge-Kutta matrix (or the Runge-Kutta 4th order "3/8" method by default).
Implements numerical propagation of an ordinary differential equation from some initial value over the desired range. This function is similar to MATLAB's variable-step ODE propagators (e.g., ode45), but uses a fixed step method. This is useful either when one knows an appropriate step size or when a process is interrupted frequently (ode45 and the similar functions in MATLAB will always make at least a certain number of steps between ts(1) and ts(2), which may be very many more than are necessary).
This function is generic for all explicit fixed-step Runge-Kutta methods. That is, any explicit fixed-step Runge-Kutta propagator can be created by passing the weights, nodes, and Runge-Kutta matrix (together, the Butcher tableau) into this function. See the example below.
[t, x] = rkfixed(ode, ts, x0, dt);
[t, x] = rkfixed(ode, ts, x0, dt, a, b, c);
[t, x] = rkfixed(ode, ts, x0, options);
[t, x] = rkfixed(ode, ts, x0, options, a, b, c);
Inputs
| ode | Ordinary differential equation function |
|---|---|
| ts | Time span, [t_start, t_end] |
| x0 | Initial state (column vector) |
| dt | Time step |
| options | Alternately, one can specify an options structure instead of dt so that this function is compatible with ode45 and its ilk. The only valid fields are MaxStep (the time step) and OutputFcn |
| a | Runge-Kutta matrix |
| b | Weights |
| c | Nodes |
Outputs
| t | Time history |
|---|---|
| x | State history, with each row containing the state corresponding to the time in the same row of t. |
Example
Simulate an undamped harmonic oscillator for 10s with a 0.1s time
step, starting from an initial state of [1; 0] using RK 4th order
integration (via the Butcher tableau specified by a, b, and c). This
is exactly the same as the rk4 function.
a = [0 0 0 0; ...
0.5 0 0 0; ...
0 0.5 0 0; ...
0 0 1 0];
b = [1 2 2 1]/6;
c = [0 0.5 0.5 1];
[t, x] = rkfixed(@(t,x) [-x(2); x(1)], [0 10], [1; 0], 0.1, a, b, c);
plot(t, x);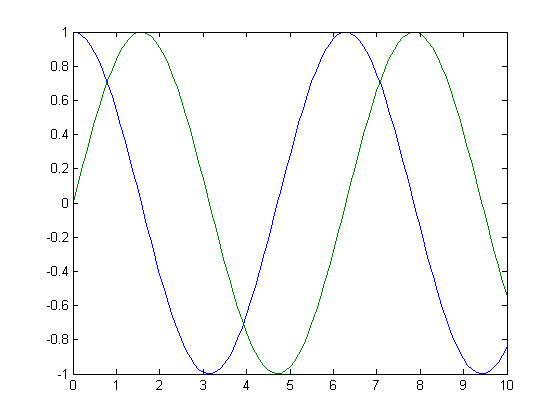
See Runge-Kutta methods on Wikipedia for discussion of the Butcher tableau (a, b, and c).
See Also
Solvers,odehybrid, rk4, rkadapt, ode45 (MATLAB), odeset (MATLAB)January 17th, 2025
©2025 An Uncommon Lab